銷售熱線:185 7555 2252
銷售熱線:185 7555 2252
數(shù)控機床運行激勵實驗模態(tài)分析
數(shù)控機床在工作狀態(tài)下的結(jié)構(gòu)動力學參數(shù)對加工效率和加工表面質(zhì)量具有重要意義.機床在實際工作狀態(tài)下的動態(tài)特性與其在靜止狀態(tài)下的動態(tài)特性不同,因此在機床靜止條件下進行模態(tài)實驗分析得到的結(jié)構(gòu)模態(tài)參數(shù)不能準確反映機床結(jié)構(gòu)的實際動態(tài)特性.并且,對于結(jié)構(gòu)規(guī)模較大的數(shù)控機床,現(xiàn)有的激勵設備也難以激勵起結(jié)構(gòu)的有效振動.由于機床是由眾多零部件組成的復雜結(jié)構(gòu),又是在多變的動態(tài)條件下工作,通過理論建模的方法建立起能夠精確模擬機床結(jié)構(gòu)的動力學模型十分困難.同時還必須考慮各結(jié)合部間的動力學特性,理論建模的精度更難以滿足實際需求.通過分析機床實際運動中振動響應可獲得機床在工作狀態(tài)下的動力學參數(shù).但數(shù)控機床工作點的激勵力難以測得.近來年,在橋梁和建筑上采用的工作模態(tài)分析方法,在傳統(tǒng)的輸入難以或無法實施的情況下,即可實現(xiàn)僅從輸出信號中估計出模態(tài)參數(shù).本文針對機床運行過程中的結(jié)構(gòu)動態(tài)特性參數(shù)識別提出了機床運行激勵的方法,通過響應數(shù)據(jù)進行機床的結(jié)構(gòu)參數(shù)辨識,對運行過程中的機床結(jié)構(gòu)進行在線模態(tài)分析.
1 運行激勵方法
1.1 運行激勵設計
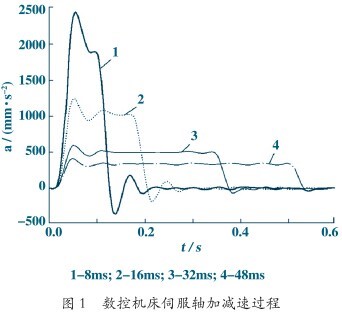
圖1是通過平面光柵測得的數(shù)控機床伺服軸在不同加減速常數(shù)作用下的加速度(Heidenhain公司的KGM182平面光柵,進給軸以10m/min進給200mm,通過位移數(shù)據(jù)差分得到伺服軸減速度),圖中:a為加速度;t為持續(xù)時間。從試驗結(jié)果可以看出:速度突變過程中,不同加減速度時間常數(shù)作用下,產(chǎn)生的加速度大小均不同,而產(chǎn)生的激勵力則與速度改變過程中的加速度大小和持續(xù)時間有關。通過改變數(shù)控裝置中的參數(shù)設置,可實現(xiàn)對激勵幅值和頻帶寬度的有效調(diào)控。
1.2 運行激勵試驗
2 參數(shù)識別
ITD法通過對自由振動響應信號進行3次不同的延時重采樣,得到矩陣
以得到的3個矩陣構(gòu)造出結(jié)構(gòu)的自由響應增廣矩陣,將系統(tǒng)模態(tài)參數(shù)問題轉(zhuǎn)化為求解系統(tǒng)特征值和特征向量問題。根據(jù)特征值與特征向量的函數(shù)關系,即可識別出結(jié)構(gòu)的模態(tài)參數(shù).
2.2 識別方法
規(guī)模較大的數(shù)控機床,其結(jié)構(gòu)低頻振動是影響加工質(zhì)量和加工效率的主要因素;因此,確定待識別自由度數(shù)m=3,并以2m作為ITD法中識別模態(tài)數(shù)N的初始值,即N=6。不斷提高N值,可得到一系列識別結(jié)果。但隨著N值提高,識別結(jié)果中的偽模態(tài)也不斷增加,因此N值不宜太大。
3 實驗結(jié)果分析
3.2 識別結(jié)果分析
在數(shù)控機床伺服進給加減速過程中,由于工作臺慣性引起的沖擊激勵通過絲杠軸承座傳遞到機床各個部分,引起機床整機結(jié)構(gòu)的振動響應.對于沖擊激勵,脈沖寬度和脈沖形狀是影響單個脈沖頻譜特性的主要因素,脈沖愈尖,持續(xù)時間愈短,頻譜的平直性愈好,如果力脈沖的頻譜在感興趣的頻率范圍內(nèi)基本上是平直的,相當于給機床施加了一個寬帶隨機激勵。
采用機床的運動部件變速運行可對機床結(jié)構(gòu)進行運動激勵,但直接采用數(shù)控G代碼對機床進行控制,由于機床數(shù)控系統(tǒng)加減速控制、驅(qū)動系統(tǒng)控制規(guī)律以及被控對象的電氣和機械慣性等影響因素,將使得運動部件在速度變化的上沿(正階躍)或下沿(負階躍)存在一個特定的過渡過程,這個過渡過程即是激勵持續(xù)的時間。
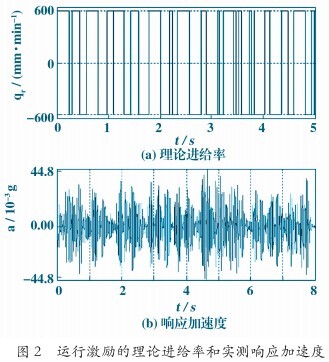
在一臺中型數(shù)控機床上以單軸進給運動激勵機床結(jié)構(gòu),為了提高激勵力的幅值和能量,采用原地往復啟停運動方式進給,每個啟停運動以偽隨機序列出現(xiàn),理論進給率qr變化如圖2(a)所示。
使用LMS SCADAS Mobile數(shù)據(jù)前端和PCB公司的356A16型ICP三向加速度傳感器測試結(jié)構(gòu)上的響應加速度。通過分析不同qr和加減速度時間常數(shù)作用下的振動響應,確定激勵運動的加減速度時間常數(shù)為16ms,qr=600mm/min。圖2(b)為該參數(shù)條件下測得結(jié)構(gòu)響應加速度幅值。
使用隨機減量法(RDT)從振動響應信號中提取自由響應信號,結(jié)合ITD法識別機床結(jié)構(gòu)的模態(tài)參數(shù)。
得到一系列子樣本響應x(t-ti),式中:D(t)是初始位移為1mm且初始速度為0mm/s的系統(tǒng)自由振動響應;v(t)是初始位移為0mm且初始速度為1mm/s的系統(tǒng)自由振動響應;x(0)和x(0)分別是系統(tǒng)在t=0時刻的初始位移和初始速度;h(t)是系統(tǒng)單位脈沖響應函數(shù);f(t)是外部激勵力;τ為積分時間變量。
將子樣本序列的時間起點ti移到坐標原點,通過無偏估計得到初始位移為A,初始速度為0m/s的自由振動響應E[x(t)]≈AD(t)。
以RDT提取自由響應信號時,輸出數(shù)據(jù)的長度L會影響識別結(jié)果的精度,ITD法中識別模態(tài)數(shù)N 取值不當,識別結(jié)果也會有較大誤差。L和N的取值決定應用RDT和ITD法所得識別結(jié)果的準確性。
主軸端部的頻率和阻尼比直接影響到加工;因此,使用RDT結(jié)合ITD方法識別主軸端部的動態(tài)特性參數(shù)。RDT輸出數(shù)據(jù)長度L過小,會影響ITD法識別結(jié)果的精度;L取值過大,輸出數(shù)據(jù)中的過多噪音信號將淹沒真實信號,分別以L=128,256,384,512提取主軸端部的響應信號,經(jīng)過對比最終確定以L=256的提取結(jié)果作為ITD法識別模態(tài)參數(shù)的輸入信號,如圖3所示。

為了最終得到結(jié)構(gòu)的真實模態(tài),通過以下方法去除偽模態(tài)。
a.在ITD識別結(jié)果中,先去除其中的非共軛根和重復根。
b.工程經(jīng)驗認為實際結(jié)構(gòu)的阻尼比ζ一般不超過20%,以此作為判據(jù)。
c.由模態(tài)穩(wěn)定性原理知偽模態(tài)的識別參數(shù)對不同階次敏感異變,故對非穩(wěn)定模態(tài)進行去除。最后,識別結(jié)果中出現(xiàn)最多、逐漸趨于穩(wěn)定的模態(tài)參數(shù)則為系統(tǒng)的真實模態(tài)。
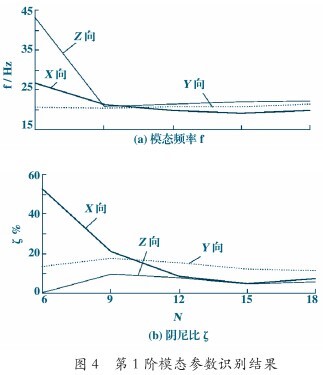
以a和b對每次N值的識別結(jié)果進行預處理,通過c綜合觀察各次識別結(jié)果,可得到結(jié)構(gòu)的真實模態(tài)參數(shù)。圖4是第1階模態(tài)頻率f和阻尼比ζ的過程數(shù)據(jù).從圖中可以看出:當N=6時,在機床坐標系Z向上識別出的f偏差較大,X向上識別出的ζ嚴重偏離合理的值范圍。不斷提高N值,該階模態(tài)的f和ζ迅速趨于穩(wěn)定。當N=18時,機床坐標系3個方向上識別出的f和ζ已達穩(wěn)定。表1中列出了3個方向上,根據(jù)本文所提方法識別出的主軸端部3階模態(tài)的f和ζ值。
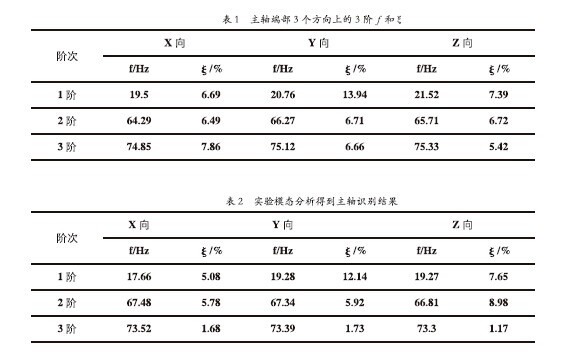
在該中型數(shù)控機床上進行錘激法實驗模態(tài)分析,力錘量程120kN,靈敏度4.31pc/N。錘頭選用尼龍材料,以保證激勵能量集中在中低頻范圍內(nèi).實驗模態(tài)分析結(jié)果見表2。
從表1和表2中數(shù)據(jù)可以看出:與實驗模態(tài)分析方法得到結(jié)果相比,本文所提出方法的第1階模態(tài)頻率的絕對誤差不超過2.5Hz;第2和3階模態(tài)頻率的相對差不超過5%。總體絕對誤差除X向上的第2階誤差較大外,其余絕對誤差接近或低于2Hz。2種方法都反映出相同的變化規(guī)律,即機床結(jié)構(gòu)在Y 向和Z向上的第1階模態(tài)頻率基本一致,略大于X 向的模態(tài)頻率。第2和3階模態(tài)頻率在3個方向基本相同。
數(shù)控機床運行激勵實驗模態(tài)分析方法,以數(shù)控機床自身運動實現(xiàn)結(jié)構(gòu)振動激勵,可用于傳統(tǒng)激勵手段難以甚至無法有效實施的大型重型數(shù)控機床的結(jié)構(gòu)動態(tài)特性分析。在今后的工作中,需要通過改進模態(tài)參數(shù)識別方法,并深入研究機床在靜止和運動條件下的邊界條件和阻尼特性差異,進一步提高本方法的阻尼比識別精度。